Retailbot
Highlights
- Researched creating real-time human safety maps in retail spaces using an autonomous mobile robot
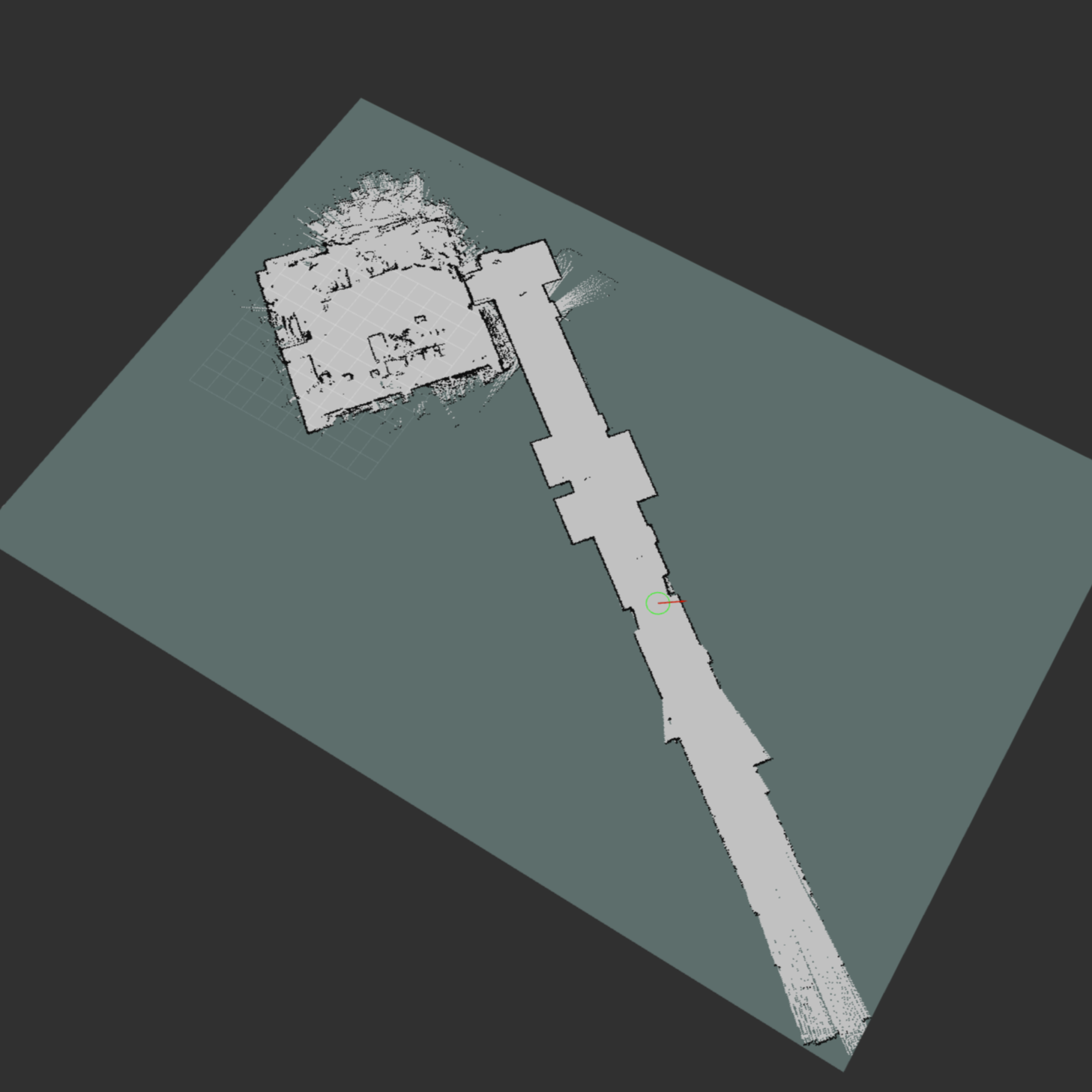
- Integrated an autonomous navigation system utilizing LiDAR, IMU, and SLAM algorithms in ROS2
- Created a custom library for Roboteq motor controllers, enabling modeling of robot wheel slip
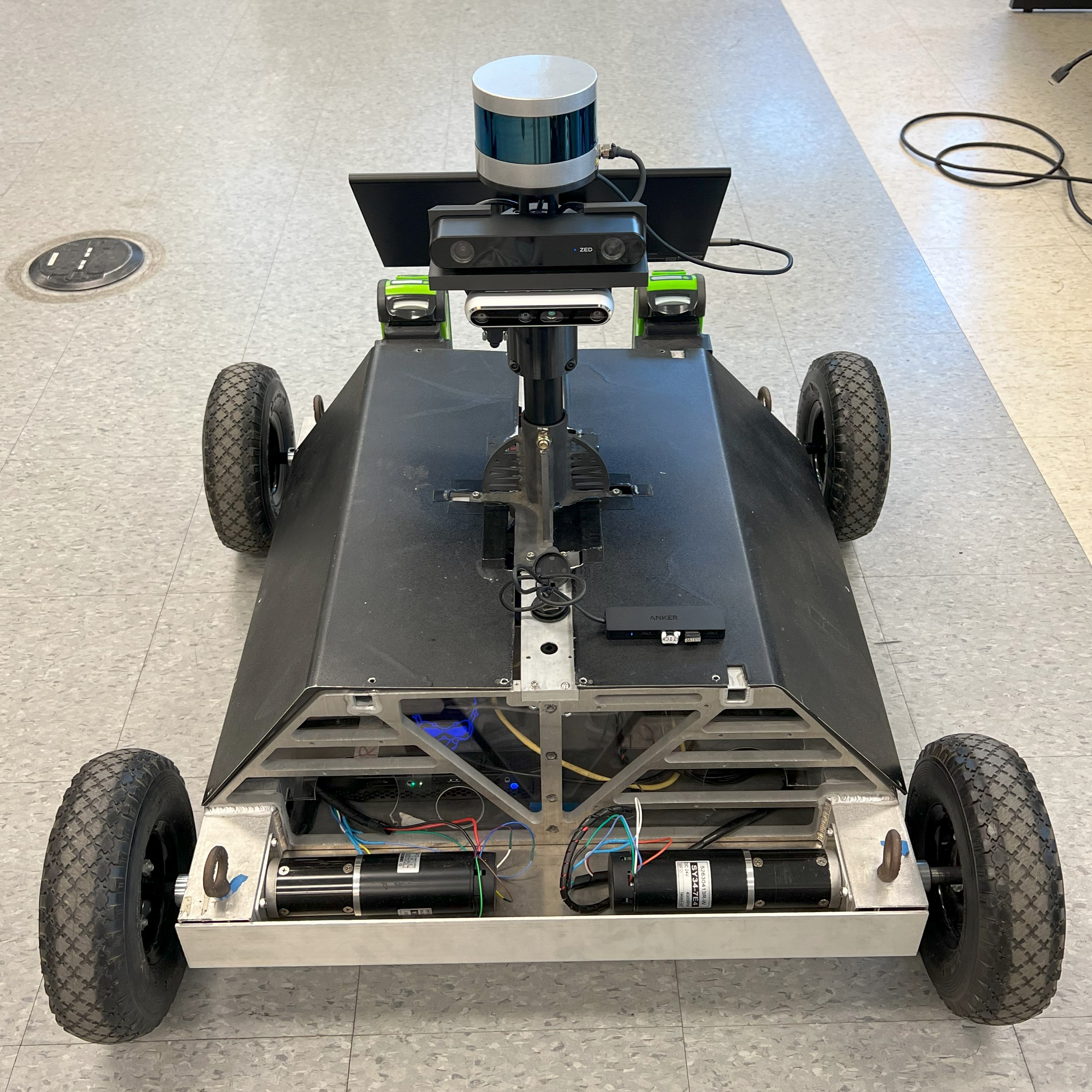
Meet Retailbot
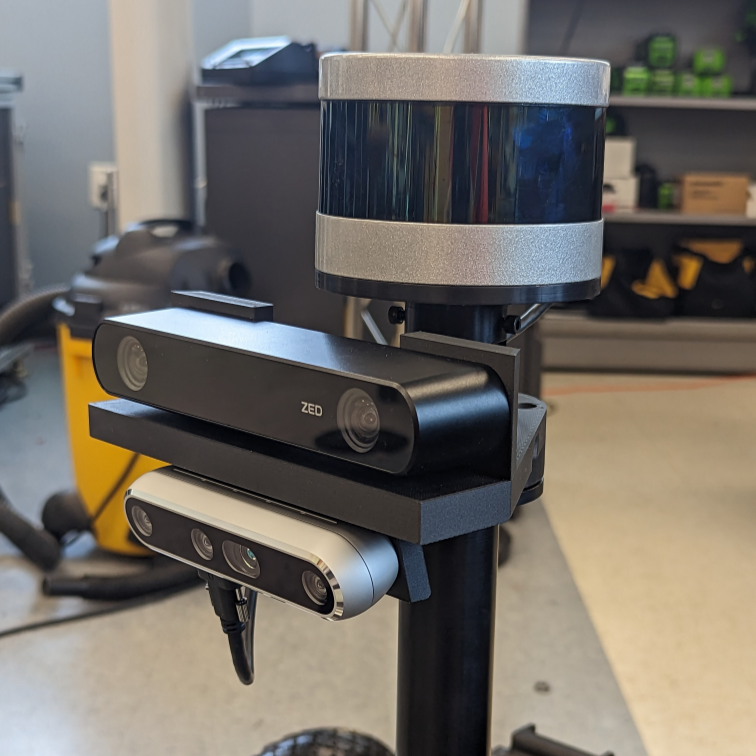
Retailbot is an indoor research robot focused on creating real-time human safety maps as part of an ongoing project at the Interactive Robotics Laboratory at WVU. Retailbot is equipped with a Velodyne VLP-16 LiDAR, an Intel Realsense D455 depth camera, and a ZED 2i stereo camera.
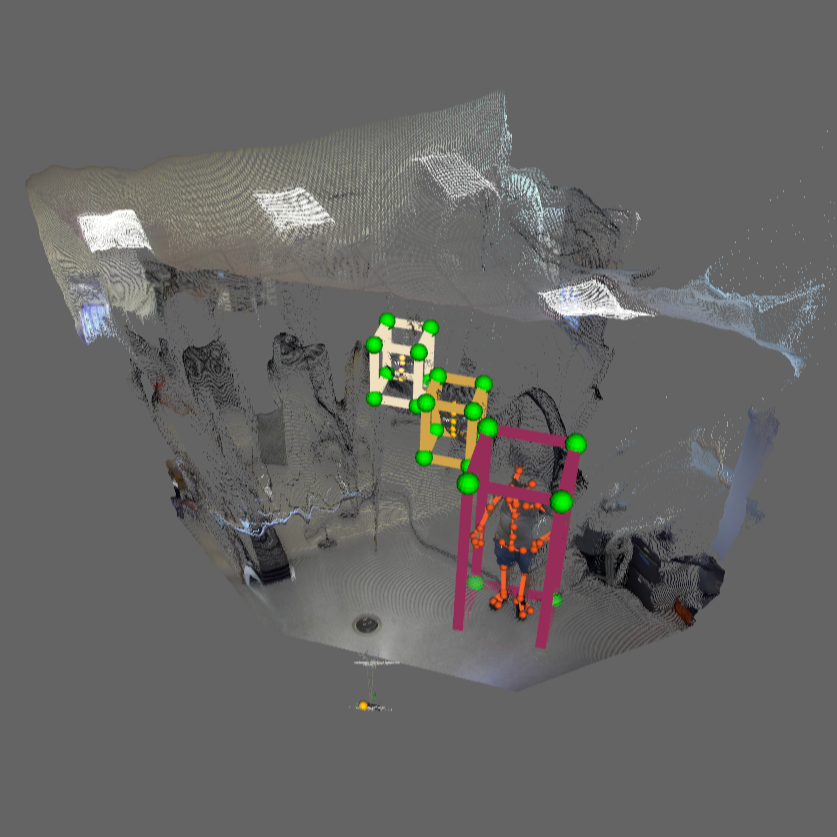
Utilizing onboard depth cameras, IMU, and motor feedback data, Retailbot aims to create a real-time walkability map of retail environments, characterizing the safety of the spaces. The goal of this project is to create safer environments for both retail workers and shoppers.
Technical Stack
My work on Retailbot included creating a library for interfacing with the Roboteq MDC2460 motor controllers, integrating all of the TOF and stereo sensors, and integrating the SLAM and autonomy stack. For autonomous navigation, Nav2 was selected for its extensive feature set, configurability, and plugin support.
- Ubuntu Linux and ROS2
- Integrated SLAM and autonomy system
- Created a custom library for Roboteq MDC2460 motor controllers
- Utilized the ZED SDK for object detection