
Robotics
Throughout my time at West Virginia University (WVU) working on hands-on projects, and conducting research, I discovered and developed a strong interest in robotics.
Freshman Year
In my freshman year, I was hungry for skills and wanted to develop as an engineer. I attended training workshops held by WVU’s maker space that covered various fabrication and design topics. After an evening at a soldering workshop in February 2022, I headed back to my dorm.
Walking to the dorms, I spotted a robot on the campus sidewalks and was immediately intrigued. As I approached, I met Stephen and Gavin, who were running a new iteration of software on a testing robot. What I thought would be a brief encounter turned into hours of conversation about the University Rover Challenge, their robot, and how I could get involved and learn more.
The next day, I joined the WVU University Rover Challenge (URC) Team as a programmer. I started attending meetings and coding sessions, eager to dive into the world of robotics. With no prior experience in robotics or software development in a team setting, I was initially intimidated.
Our team advisor, Dr. Yu Gu, embraces a trial-by-fire approach on the team where exploration is encouraged and failure is an expected and treasured obligation. This is a philosophy that I continue to appreciate today.

Slowly, I was able to build up a modest collection of small programs utilizing the Robot Operating System (ROS). Becoming more confident, my next goal was contributing to that year’s robot. My first real task on the team was developing the robot’s feedback system for path following.
After working with experienced programmers, debugging failed iterations, and pouring over massive amounts of forum posts and documentation, the system finally worked. This experience strengthened my interest in robotics, and my appreciation for reading documentation. I was invigorated and wanted to learn more.
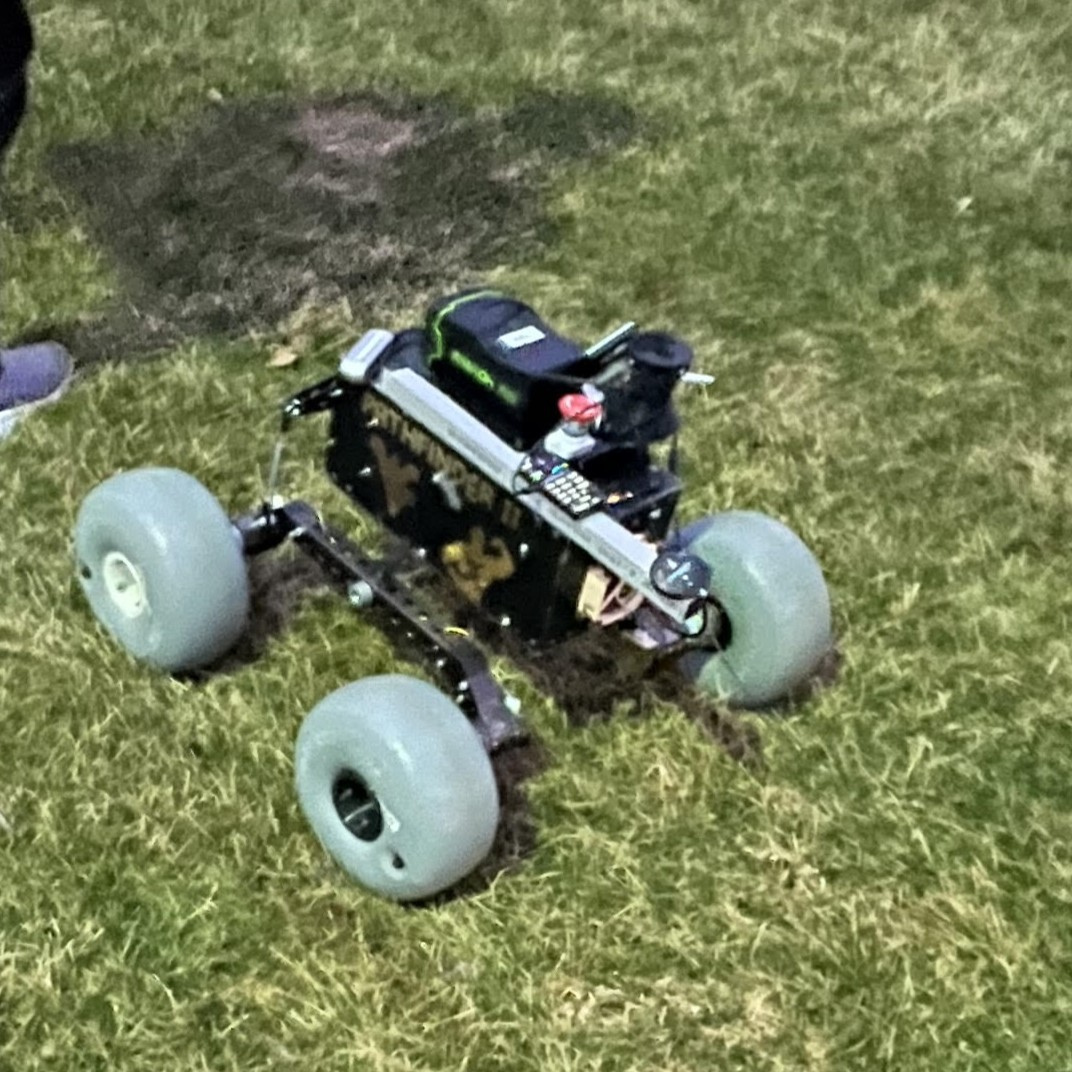
In May 2022, I started conducting research on swarm robotics under the guidance of Dr. Gu at the WVU Interactive Robotics Laboratory. Our research centered around a robot named Loopy, which consisted of a closed chain of servo motors that function as independent agents, each with a single degree of freedom.

The focus of the preliminary research was on consensus methods in swarm robotics, particularly how they could be applied in combination with human interaction to enable Loopy to create decentralized shapes.

Sophomore Year
During my sophomore year, the lab’s graduate students and I continued researching various swarm robotics concepts including how turing patterns can enable Loopy to morph or undergo transformation.
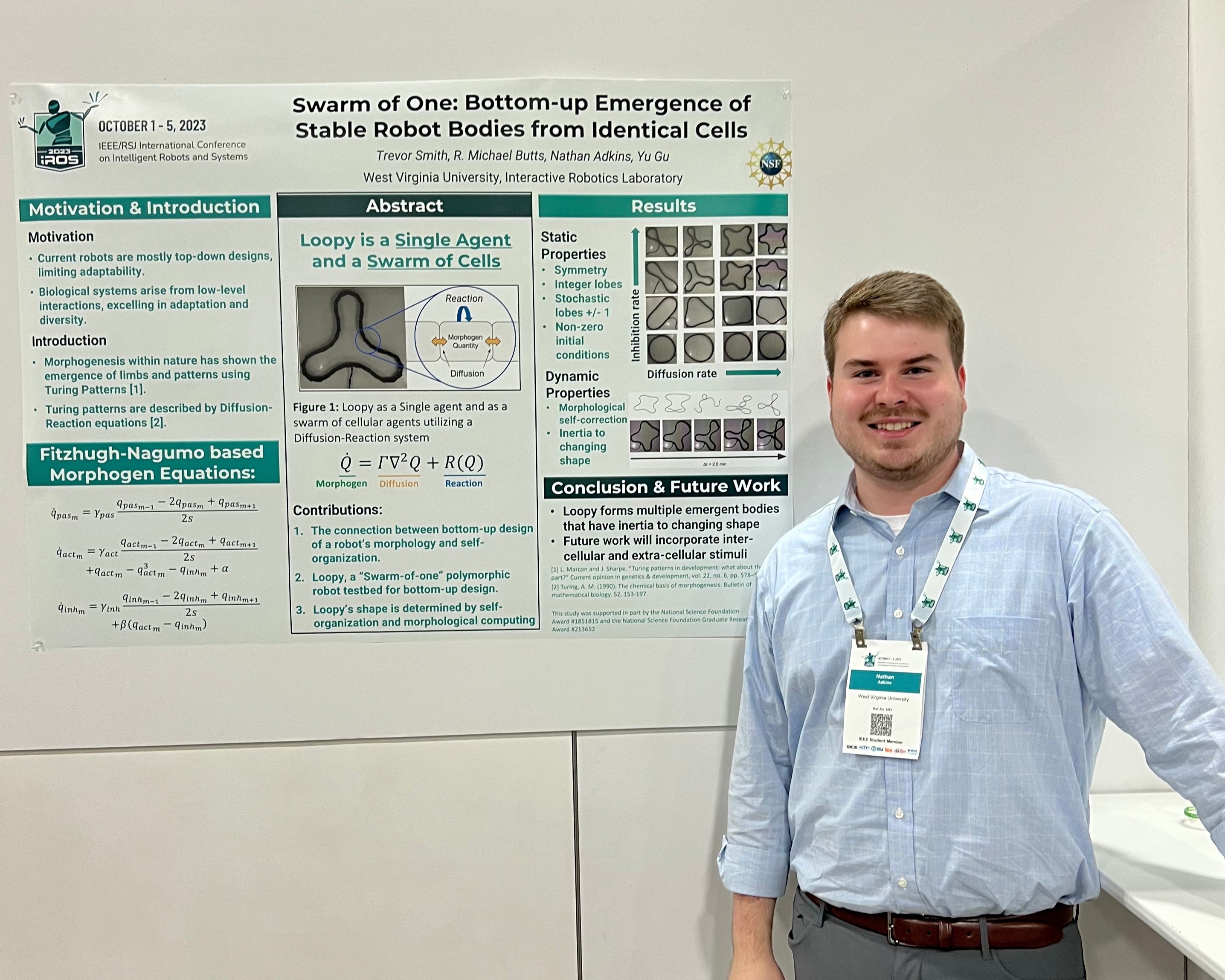
In our continued research, we applied reaction-diffusion models to Loopy, showing how biologically inspired approaches can generate adaptable and dynamic morphologies in robot swarms. As a result of this research, I co-authored an IROS 2023 paper.
I continued volunteering with the WVU URC Team and began as the Programming Lead in August 2022. In this position, I trained over 20 new programmers on software libraries and tools, while also leading the design, development, and testing of our robot’s autonomy system. Our efforts culminated in a first-place victory at the 2023 competition, marking a step forward for the myself and the team.

Starting in May 2023, I began working on a new project at the Interactive Robotics Laboratory. This new research was focused on developing methods for generating a real-time safety map of retail spaces with a ground-based robot. Utilizing lidar, inertial sensors, and onboard cameras, the goal of the robot was to map hazardous conditions in retail spaces that humans may encounter. This research included collaboration with the University of Florida and funding from the National Science Foundation.

Junior Year
In my third year being on the WVU URC Team, I established the algorithms subteam to provide members interested in robotics the opportunity to explore specific topics in greater depth. The subteam focused on integrating cutting-edge robotics algorithms and concepts onto our robot, ensuring that its capabilities kept pace with advancements in industry and academia.

Once the new 2024 URC rules were released in September 2023, our team started developing our new competition robot. We finalized designs, ordered parts, and tested new sensors, path planning algorithms, and autonomy systems on robots from previous years. During this time, we also held outreach events to engage new students interested in joining the team.

In October 2023, I attended the IEEE/RSJ International Conference on Intelligent Robots and Systems in Detroit, Michigan, where I had the opportunity to present our prior research on swarm robotics alongside my graduate student colleagues.
After winter break ended and all our parts were delivered, we assembled the new URC robot and began software development, integration, and testing. As we transitioned between major versions of ROS, our team faced tight development deadlines during a stressful but rewarding period. Our software stack was entirely overhauled, from device drivers to our robot’s communications system.

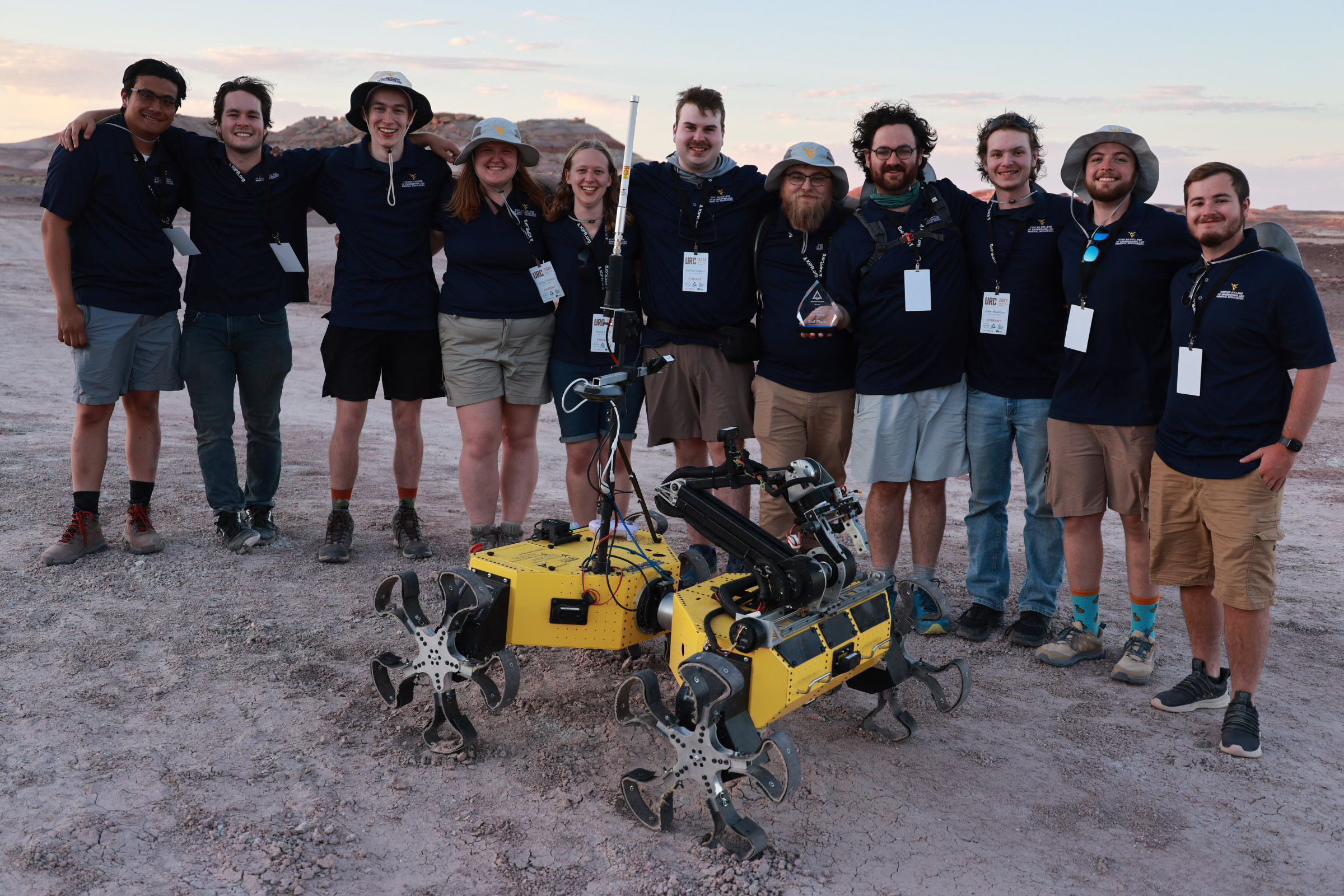
After months of integration and testing, our team submitted our system acceptance review to the competition judges and was selected to compete in Hanksville, Utah, at the Mars Desert Research Station.
In May of 2024, during our week of travel and competition, our team spent evenings preparing for missions. We practiced setup procedures and failure recovery plans to ensure we were ready for worst-case scenarios.

During the autonomy mission, we set up in the basestation, started our robot’s autonomy system, and observed its performance. Ultimately, we placed second in the mission, with our robot successfully navigating the rocky and unforgiving terrain to reach the mission goals.

After completing all of the missions in the competition, our scores were totalled by the judges. We had placed second overall in the 2024 competition.

Looking back on the months of preparation and the countless hours spent debugging, improving, and testing our robot, I realized how much I had grown as both a leader and a roboticist. Each problem I faced helped me build not only my technical skills but also my ability to guide a team through complex problems. Placing second in the competition was a testament to all the hard work, and I was incredibly proud of what our team and myself accomplished. As I moved into my senior year, I was eager to build on my technical insights, my leadership skills, and on the continued success of our team.
Senior Year
Coming soon.
Acknowledgements
To Dr. Gu — thank you for your years of mentorship, support, and for fostering an environment where curiosity, failure, and resilience are encouraged.
To Stephen and Gavin — thank you for introducing me to robotics and mentoring me as a new roboticist.
To Kendra, Tyler, Riley, and Jalen — thank you for years of collaboration, for helping build a team of world-class engineers and a world-class robot, and for the rewarding experiences and memories.